
Robotics

Robots for the real world
Oregon State’s highly regarded robotics program is part of the Collaborative Robotics and Intelligent Systems Institute. The culture of collaboration leads to research in agriculture, forestry, oceanography, and many other areas.
Undergraduate and graduate students have opportunities for research experiences in numerous areas of robotics including underwater robotics, human-robot interaction, agricultural, soft robots, drones, bio-inspired robotics, law and policy around robotics, robots for education and health care.
Related degrees include artificial intelligence, computer science, electrical and computer engineering, industrial engineering, materials science, and mechanical engineering.
Degree Types
Locations
Corvallis
Our Faculty
Explore our faculty's expertise and research.
Contact our industry relations team to discuss partnerships and other opportunities.
Faculty Research Areas
Our faculty and students engage in cutting-edge robotics research with a focus on how that research impacts the real world.
Bio-Inspired Robotics
Using inspiration from nature to advance robot design and behavior
Decision-Making and Locomotion
Intelligent robot locomotion and decision-making in complex environments
Field Robotics
Building robots for reliable operation in unstructured outdoor environments
Human-Robot Interaction/Teaming
Designing safe, effective human-robot interaction and teaming systems
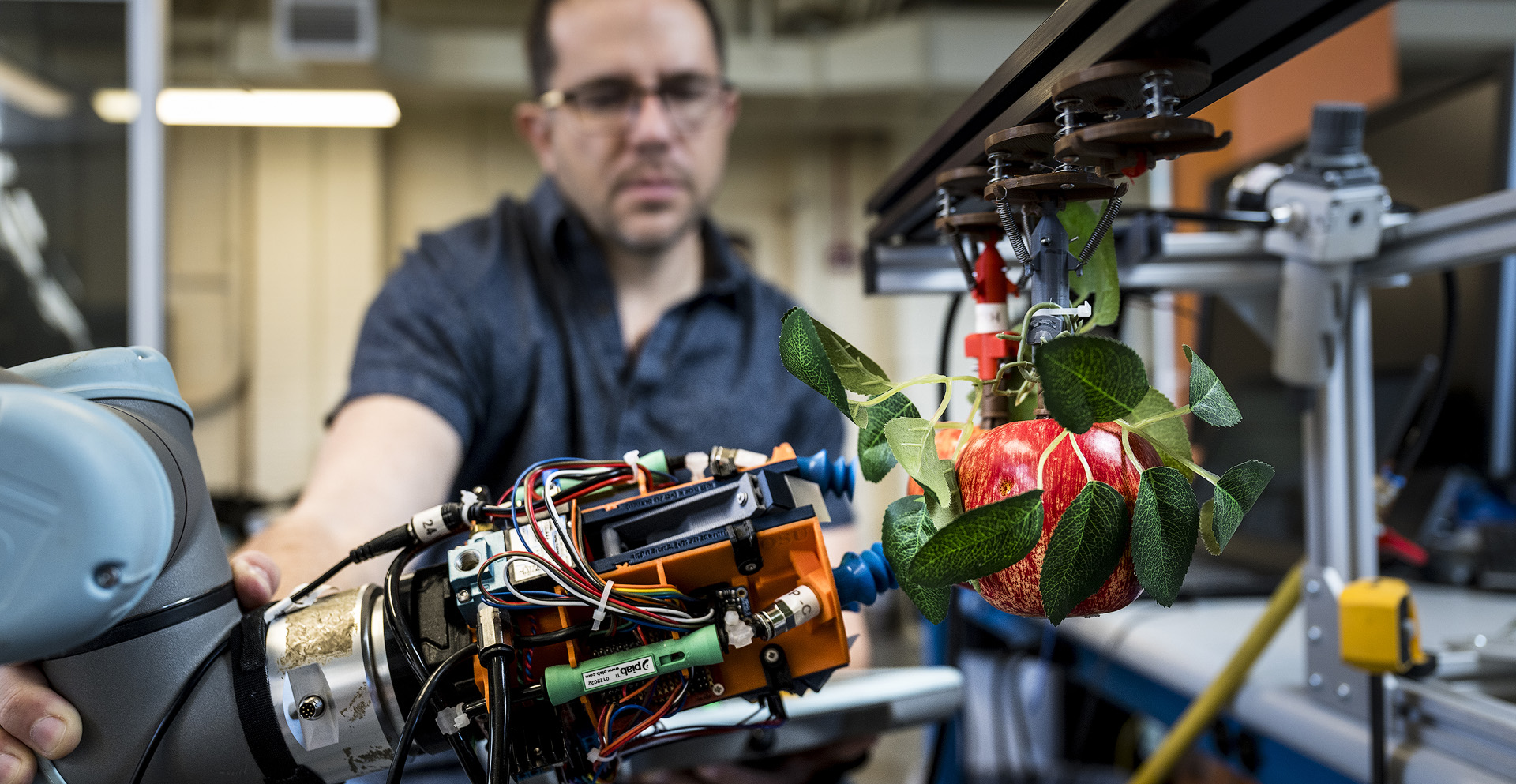
Manipulation and Grasping
Human-inspired robotic manipulation for real-world tasks in work and nature
Multiple-Robot/Swarm Coordination
Coordinated robot swarms for intelligent team behavior in real‑world missions
Robot Perception
Robust robot perception for sensing and acting in real‑world environments
Soft Robotics
Designing soft, flexible robots inspired by biology for real-world tasks

Building robots to improve human lives

We innovate solutions for real-world problems
We are developing solutions for agriculture, disaster response, package delivery, marine renewable energy, and more.
- We revolutionized humanoid robot locomotion that led to the Digit robot.
- Collaborations with farmers are creating solutions for labor shortages.
- We are developing robot swarms that can monitor melting ice shelves.
- We discovered one human can command over 100 robots.


Robotics Research Powerhouse
The Collaborative Robotics and Intelligent Systems Institute, housed in Graf Hall, is a leading center for robotics research, providing a collaborative space for students and faculty.

Program Details
Degree Types
Locations
Corvallis
Our Faculty
Explore our faculty's expertise and research.
Get in Touch
Partnerships
Contact our industry relations team to discuss partnerships and other opportunities.

We are collaborating to solve national problems

AI Caring Institute
Oregon State is among seven universities working with Amazon and Google to improve quality of life of older adults.
AgAID Institute
Oregon State is part of a coalition employing AI to find solutions for global agricultural challenges.

Related Stories


