Manipulation and Grasping
Robotics Faculty Research Area
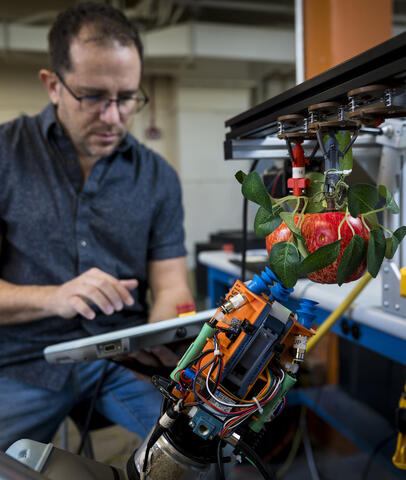
The Manipulation and Grasping research area develops algorithms, testbeds, and end-effectors for advancing robotic manipulation and grasping by leveraging human-inspired strategies for physical interaction and machine learning techniques. This research uses a variety of human-robot interaction paradigms to collect data, including physical interactions, and fuse insights from computer simulation and physical experiments. Novel testbeds are developed for evaluating complex manipulation and grasping tasks (e.g., underwater grasping and apple picking).
The manipulation and grasping application areas span from underwater grasping to in-hand manipulation to apple picking. Real-world domains include marine robotics, agriculture, and manufacturing.
Faculty
Ravi Balasubramanian
Associate Professor
ravi.balasubramanian@oregonstate.edu
Research Groups
Artificial Intelligence and Robotics | Robotics



Cindy Grimm
Professor
Additional Positions
Robotics Graduate Program Director
Research Groups
Computer Graphics and Visualization | Robotics


Cristina G. Wilson
She/Her
Assistant Professor-Senior Researcher
Research Groups
Robotics