Robot Perception
Robotics Faculty Research Area
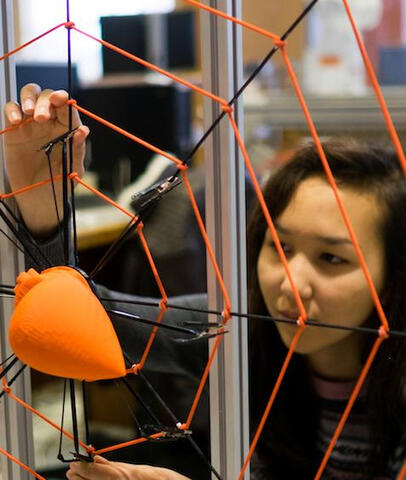
Robot perception focuses on enabling robots to sense, interpret, and reason about the physical world through data from cameras, depth sensors, lidar, tactile sensors, and other modalities. Research in this area develops algorithms and learning-based methods that enable robots to build geometric and semantic representations of their environments, including robot pose and proprioception; track objects and agents over time; and understand scene dynamics under uncertainty. Research in this area also develops novel sensors, including tactile sensing and camera-free motion capture.
At Oregon State University, robot perception research spans topics such as visual and multi-modal sensing, 3D reconstruction and mapping, object segmentation, tracking and shape completion, semantic understanding and 3D vision-language models, 3D point tracking, state estimation and world modeling, and perception for manipulation, navigation, and human–robot interaction. Emphasis is placed on robust perception in real-world settings, including unstructured, dynamic, partially observable, and field-robotics environments that may be visibility-limited (e.g., dark operations, turbid water, etc.). This work is tightly integrated with learning, control, and planning to support autonomous robotic systems that can operate reliably in the wild.
Labs
Faculty

Julie A. Adams
Professor | College of Engineering Dean's Professor
Additional Positions
CoRIS Associate Director for Research
Research Groups
Artificial Intelligence and Robotics | Software Engineering and Human-Computer Interaction


Cindy Grimm
Professor
Additional Positions
Robotics Graduate Program Director
Research Groups
Computer Graphics and Visualization | Robotics


Geoff Hollinger
Professor
geoff.hollinger@oregonstate.edu
Research Groups
Artificial Intelligence and Robotics | Robotics

Matthew Johnston
Professor
matthew.johnston@oregonstate.edu
Research Groups
Electronic Materials and Devices | Integrated Electronics | Health Engineering

Stefan Lee
Associate Professor | Brent and Elaine Leback Professor in Engineering
Research Groups
Data Science and Engineering | Artificial Intelligence and Robotics
Fuxin Li
Professor
Research Groups
Data Science and Engineering | Artificial Intelligence and Robotics