Introduction
Professor Julie A. Adams and her team of roboticists are hard at work developing a set of adaptive capabilities for human-robot teaming. In a recent interview, Adams explained her team’s focus on swarm robotics, where hundreds of robots are deployed simultaneously. The team’s goal is to enable a single human to deploy and control a robot swarm while maintaining a normal workload without being overburdened. Adams envisions swarms of robots assisting first responders, both grounded and aerial, and her team’s recent results demonstrate the first-ever data showing that the multidimensional workload estimation algorithm can estimate workload for swarms.
Her research spans efforts for DARPA, the FAA, NASA, and ONR, some in collaboration with industry partners like Raytheon BBN and Smart Information Flow Technologies, Inc. (SIFT), Adams is well connected to industry and involved in ongoing research.
Please tell us a little about your background. What’s your research focus?
I have a Ph.D. in computer and information sciences. My research has three focuses: human factors and interaction with complex systems; distributed artificial intelligence algorithms; and robotics. I've worked on many different systems throughout my career, from aircraft at Honeywell to image processing systems at Kodak to robots. I've been at Oregon State seven and was previously at Vanderbilt.
Can you share more about your research?
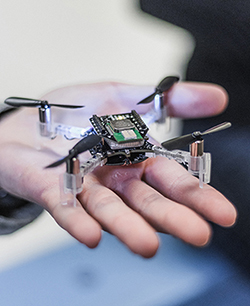
The Human-Machine Teaming Laboratory has a swarm robotics testbed we developed here at Oregon State University. We have small robots, both ground and aerial. The aerial robots are Bitcraze Crazyflies, and they fit in the palm of your hand. There are also the ground robots, which were originally based off of the GritsBots from Georgia Tech, but we have redesigned them multiple times, so they're actually our own design. These 4 cm by 4 cm robots have very limited processing and sensing capabilities. As part of the DARPA OFFSET program, our team — led by Raytheon BBN, that also included SIFT— was tasked with developing a swarm of 250 ground and aerial robots to be deployed in an urban environment by a single human operator.
The OFFSET program robots are commercially available. The aerial robots, or unmanned aerial systems, carried smallish sensors and processor payloads. The ground robots were also fairly small, about 24 inches long by 18 inches wide. The expected large size of the swarm, including spare parts, required that the vehicles be fairly inexpensive. Our most expensive vehicle was just under $4,000, which is not going to give you the same capabilities of most larger outdoor robots. So, that makes it much harder to do the tasks we were trying to do.
What have you and your team accomplished regarding adaptive capabilities for human-robot interaction?
For 15 years or so, we have been developing a set of adaptive capabilities for human-robot teaming. Our multidimensional workload estimation algorithm allows the robot to perceive a human’s workload, or how the human is responding to the amount of work that they need to do. We use wearable sensors to make these estimates, and one day we will be able to deploy these sensors in the field, with actual first responders teaming with robots.

The approach estimates seven workload components - such as cognitive, visual, fine motor - and overall workload. Each workload component requires a model trained to identify different aspects of the human’s workload so the robot adapts appropriately to what the human is doing. We are also developing the capability to identify the tasks that the human is doing, which is necessary to estimate the workload of humans in situ. We recently applied our multidimensional workload algorithm to the results from the DARPA OFFSET program to estimate the workload of a single human deploying over 100 robots. The estimation algorithm was trained using data from a different domain, but we were able to estimate the human’s workload when supervising ground and aerial robots deployed in an urban environment. The results show that we can map what the human was doing with respect to changes in the human’s estimated workload. This is a huge achievement. It's the first time this algorithm has been applied to such a domain. It is also the first known data set of this nature. Previously, there has not been any concrete evidence, with objective metrics of any type, that a single human can maintain a normal workload level, and not be overburdened when deploying over 100 highly autonomous robots in an urban environment.
Stepping back a bit, what brought you to Oregon State in the first place?
Well, that was the result of two years of the robotics faculty recruiting me. Certain aspects were attractive to me. My Ph.D. is from the University of Pennsylvania, the GRASP Laboratory, which was one of the first robotics laboratories in the country. The GRASP Lab is very collaborative and interdisciplinary in nature. Those same features exist at Oregon State and within Collaborative Robotics Intelligence Systems Institute, or CoRIS.
The Oregon State robotics faculty are primarily from the schools of Mechanical, Industrial, and Manufacturing Engineering and Electrical Engineering and Computer Science, and this interdisciplinary nature is also embodied in the AI program, with faculty from multiple schools. There are a lot of applied users at Oregon State, including those in agriculture, oceanography, forestry, etc. There are just many unique collaboration opportunities. For example, I've collaborated with Ramesh Sagili in the Honey Bee Lab to conduct studies of honeybee behaviors that we converted into controllers for swarm robots as part of a DARPA project with SIFT. Those are opportunities that don't exist at smaller engineering schools.
The robotics program at Oregon State is thriving under the leadership of prominent researchers such as Adams. Her team is exploring new frontiers in optimizing human control over robotic swarms, unveiling exciting possibilities for transforming the composition and function of human-robotic teams. The team's results provide a solid foundation for deploying swarms consisting of hundreds of grounded, aerial, and/or marine robots, offering vast potential for applications across industry and in fields such as first response, wildland fire response, and natural disaster response.
If you’re interested in connecting with the AI and Robotics Program for hiring and collaborative projects, please contact AI-OSU@oregonstate.edu.